Python remote API 逆向運動學函式 <<
Previous Next >> Basket control program
W17
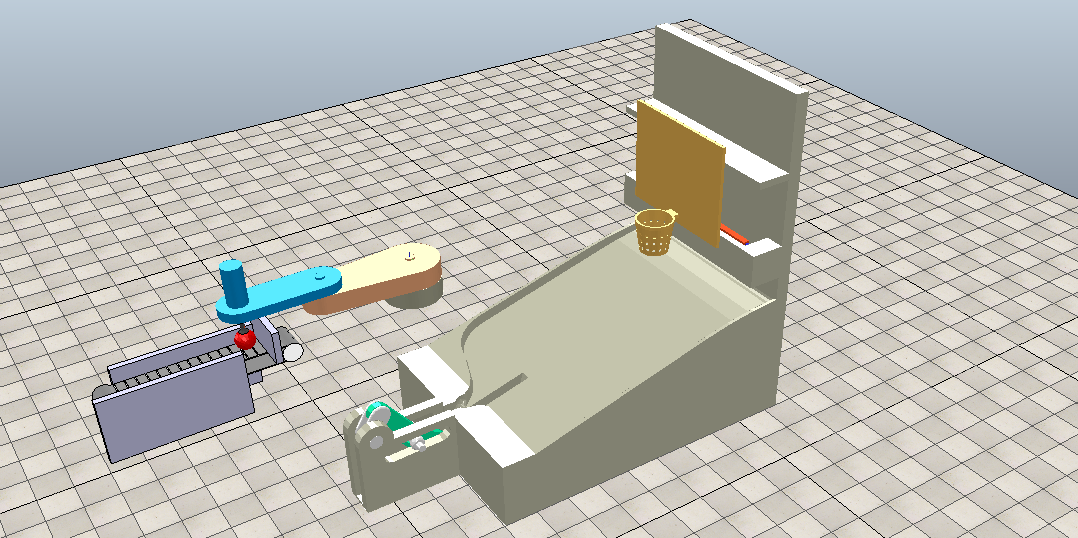
專題名稱:籃球機三代
做法:在原先的籃球機二代上,我們進行籃框的修改將原先固定的方式,
改成左右移動,並且利用方軸來控制
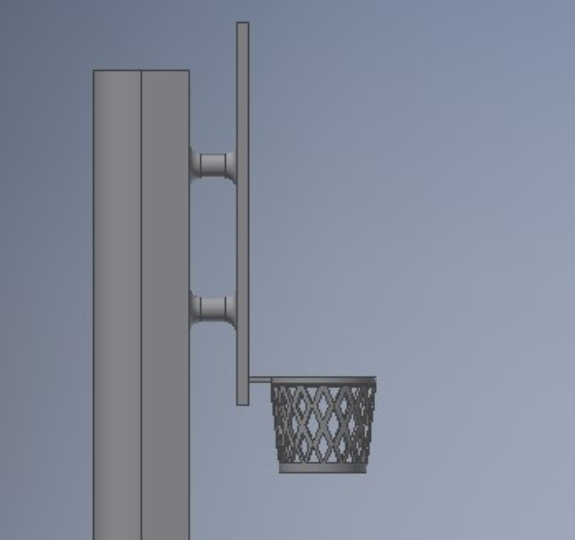
此為第二代籃框
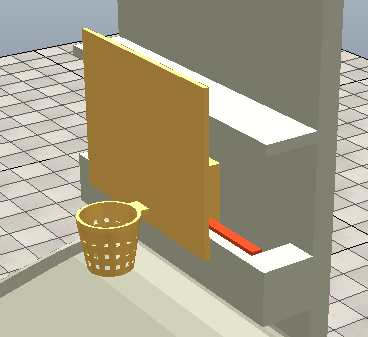
此為第三代籃框
完成品

member:
40823110 repo | 40823110 web |
40823125 repo | 40823125 web |
40823117 repo | 40823117 web |
40823122 repo | 40823122 web |
40823129 repo | 40823129 web |
40823149 repo | 40823149 web |
40823152 repo | 40823152 web |
40823153 repo | 40823153 web |
小組:
stage3-ag6網站
stage3-ag6倉儲
Python remote API 逆向運動學函式 <<
Previous Next >> Basket control program